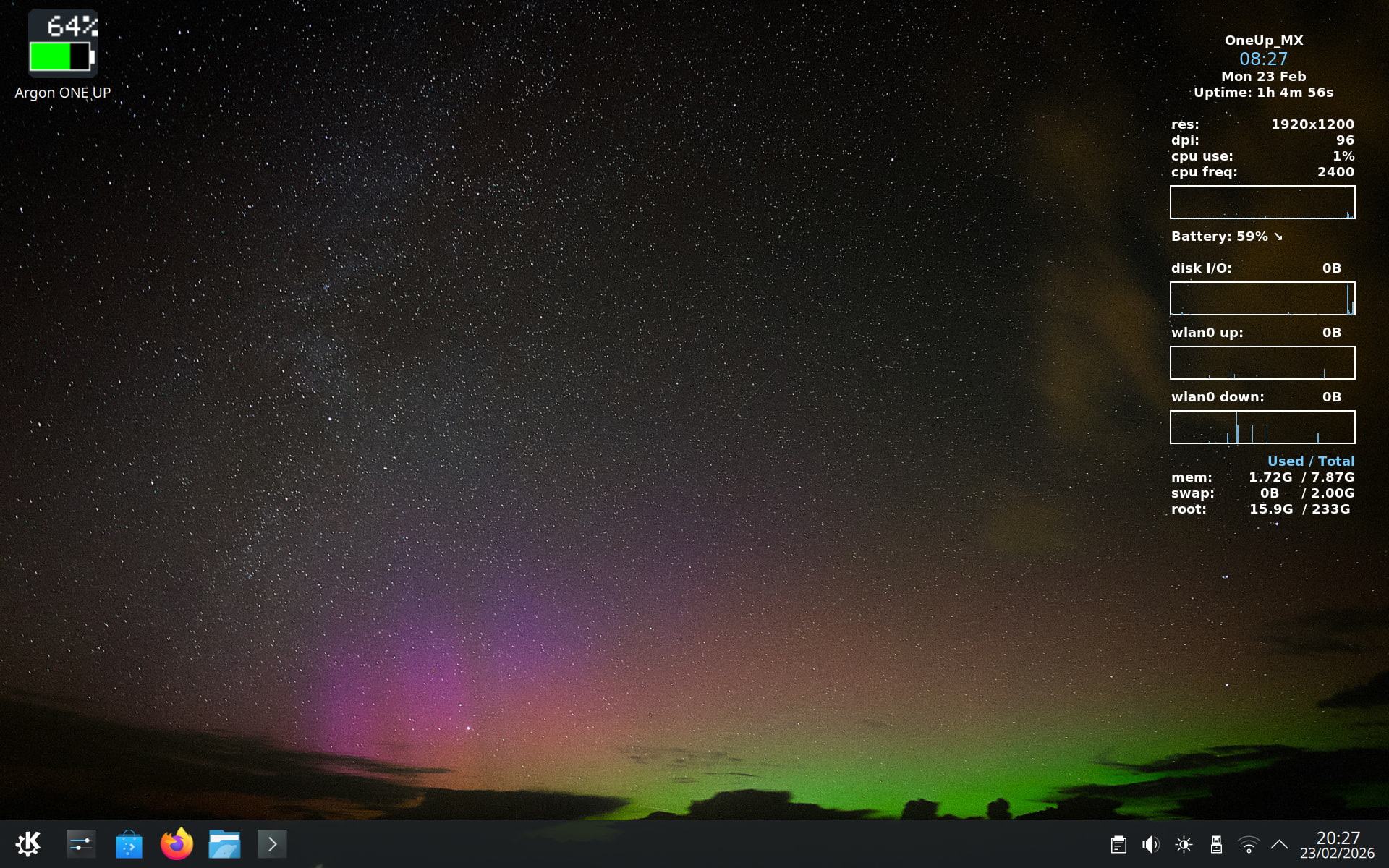
Thanks Dukla2000, this seems to me to be the most elegant solution! However mine looks like this …
What am I doing wrong? Seems to my untrained Conky-eye that I need a new-line /n between the CPU graph and the battery percentage - any help would be appreciated!
conky.config = {
-- Standard antiX .conkyrc file written by Team antiX.
-- Feel free to use.
-- anticapitalista@riseup.net
-- Note: delete the line above to disable automatic scaling with DPI
-- on the live system.
-- set to yes if you want Conky to be forked in the background
background = true,
short_units = true,
cpu_avg_samples = 1,
net_avg_samples = 1,
out_to_console = false,
-- X font when Xft is disabled, you can pick one with program xfontsel
--font 7x12
--font 6x10
--font 7x13
font = '8x12',
--font 7x12
--font *mintsmild.se*
--font -*-*-*-*-*-*-34-*-*-*-*-*-*-*
--font -artwiz-snap-normal-r-normal-*-*-100-*-*-p-*-iso8859-1
-- Use Xft?
use_xft = true,
-- Xft font when Xft is enabled
--xftfont gentium:size=12
--ftfont DejaVu Sans:size=10
font = 'DejaVu Sans:bold:size=9',
--xftfont DejaVu Sans:size=9
-- Create own window instead of using desktop (required in nautilus, pcmanfm and rox desktops)
own_window = true,
own_window_transparent = true,
own_window_hints = 'undecorated,sticky,skip_taskbar',
-- Text alpha when using Xft
xftalpha = 1.0,
--on_bottom no
-- mail spool
-- mail_spool $MAIL
-- Update interval in seconds
update_interval = 1,
-- Use double buffering (reduces flicker, may not work for everyone)
double_buffer = true,
-- Minimum size of text area
minimum_width = 5, minimum_height = 5,
maximum_width = 180,
-- Draw shades?
draw_shades = false,
-- Draw outlines?
draw_outline = false,
-- Draw borders around text
draw_borders = false,
-- Stippled borders?
stippled_borders = 0,
-- border margins
--border_margin 10
-- border width
border_width = 1,
-- Default colors and also border colors
default_color = 'white',
default_shade_color = 'white',
default_outline_color = 'white',
color1 = 'ffffff',
color2 = 'ffffff',
color3 = 'ffffff',
color4 = 'yellow',
color8 = '77ccff',
color9 = '5599cc',
-- Text alignment, other possible values are commented
-- alignment top_left
alignment = 'top_right',
--alignment bottom_left
--alignment bottom_right
-- Gap between borders of screen and text
gap_x = 30,
gap_y = 30,
-- Add spaces to keep things from moving about? This only affects certain objects.
use_spacer = 'right',
-- Subtract file system buffers from used memory?
no_buffers = true,
-- if_up_strictness link: up | link | address
if_up_strictness = 'address',
-- set to yes if you want all text to be in uppercase
uppercase = false,
-- boinc (seti) dir
-- seti_dir /opt/seti
--# antiX additives examples. Add below Text##
--#Battery examples##
--#${color}battery: ${color}$acpiacadapter, ${battery_percent BAT1}%
--#${color}battery:${color} ${battery}
--${color}ACPI Battery: ${color}$battery
--${battery_bar 11,0}
--#Wireless example##
--${color}Wireless:
--${color}essid: ${wireless_essid $template6}
--${color}IP:${color} ${addr $template6}
--${color}speed: ${color} ${wireless_bitrate $template6}
--${color}link strength: ${color} ${wireless_link_bar 7,50 $template6}
own_window_argb_value = 0,
own_window_argb_visual = true,
own_window_colour = '000000',
-- time template
template0 = [[${if_match "pmfix${time %p}" == "pmfix"}${time \1}${else}${time %I:%M}${endif}]],
-- battery templates
template1 = [[${alignc}${exec /home/pi/bin/battery.sh}\n]],
-- template2 = [[${template1 0}${template1 1}]],
-- network templates
-- template3 = [[${color}\1 \2: $alignr${color3} ${\2speed \1}\n${color2}$alignr${\2speedgraph \1 30,170 5599cc 5599cc}]],
-- template4 = [[${if_up \1}${template3 \1 up}\n${template3 \1 down}\n${endif}]],
-- template5 = [[${template4 $template4}${template4 $template5}${template4 $template6}${template4 $template7}]],
template4 = 'eth0',
template5 = 'eth1',
template6 = 'wlan0',
template7 = 'wlan1',
};
-- fluxbox adjustment
return_code = os.execute('pidof -q fluxbox')
if _VERSION == 'Lua 5.1' and math.floor(return_code/256) == 0 or
_VERSION ~= 'Lua 5.1' and return_code then
conky.config.own_window_transparent = true
conky.config.own_window_argb_visual = false
end
-- stuff after 'TEXT' will be formatted on screen
conky.text = [[
${color3}${alignc}OneUp_MX
${color8}$alignc${font DejaVu Sans:size=12}${template0 %H:%M}$font
${color}${alignc}${time %a %d %b}
${color}${alignc}Uptime: $uptime
${color}res:${alignr}${color3}${execi 600 xdpyinfo | awk '/dimensions/ { print $2}' }
${color}dpi:${alignr}${color3}${execi 600 xdpyinfo | awk '/resolution/ { sub(/x[0-9]*/,"",$2); print $2}' }
${color}cpu use:${alignr}${color3}${cpu}${color}%
${color}cpu freq:${color3}${alignr}${freq}
${color}$alignr${cpugraph cpu0 30,170 5599cc 5599cc}\
# battery
${template1}
${color}disk I/O:${alignr}${color3}${diskio}
${color}${alignr}${diskiograph 30,170 5599cc 5599cc}\
# network
${if_up $template4}
${color}$template4 up: $alignr${color3} ${upspeed $template4}
${color}$alignr${upspeedgraph $template4 30,170 5599cc 5599cc}
${color}$template4 down: $alignr${color3} ${downspeed $template4}
${color2}$alignr${downspeedgraph $template4 30,170 5599cc 5599cc}${endif}${if_up $template5}
${color}$template5 up: $alignr${color3} ${upspeed $template5}
${color}$alignr${upspeedgraph $template5 30,170 5599cc 5599cc}
${color}$template5 down: $alignr${color3} ${downspeed $template5}
${color2}$alignr${downspeedgraph $template5 30,170 5599cc 5599cc}${endif}${if_up $template6}
${color}$template6 up: $alignr${color3} ${upspeed $template6}
${color2}$alignr${upspeedgraph $template6 30,170 5599cc 5599cc}
${color}$template6 down: $alignr${color3} ${downspeed $template6}
${color2}$alignr${downspeedgraph $template6 30,170 5599cc 5599cc}${endif}${if_up $template7}
${color}$template7 up: $alignr${color3} ${upspeed $template7}
${color2}$alignr${upspeedgraph $template7 30,170 5599cc 5599cc}
${color}$template7 down: $alignr${color3} ${downspeed $template7}
${color2}$alignr${downspeedgraph $template7 30,170 5599cc 5599cc}${endif}
${color}${alignr}${color8}Used / Total
${color}mem:${alignr}$mem ${color3} /${color} $memmax
${color}swap:${alignr}$swap ${color3} /${color} $swapmax
${color}root:${alignr}${fs_used /} ${color3} /${color} ${fs_size /}
]]
BTW I don’t grow any spanpek, but I do breed Rhodesian Ridgebacks https://cairn.co.za/rr